
Go beyond simply reading IMU values. In this course, you will learn how to turn raw accelerometer and gyroscope data into accurate roll, pitch, and yaw estimates. By implementing real filtering and attitude estimation algorithms step by step, you will gain the practical skills needed to build reliable orientation systems used in robotics, drones, and stabilization platforms.
STM32 Attitude Estimation Course
Turn Your STM32 + IMU Into a Working Attitude Estimation System.
Stop being stuck with sensors and confusing math. Learn step-by-step how to read raw IMU data, compute orientation (Euler angles & quaternions), and build stable attitude estimation with Kalman/Complementary filtering using STM32 SPI, UART, and timer-interrupt code.
⭐ Bestseller
⭐ 4.9/5 by students
👨🎓 200+ students enrolled
Enroll NOWLifetime
$40
$80
✔14-day money-back guarantee
✔Lifetime access
✔Beginner Friendly
✔Certificate of Completion
✔ 37 lessons
✔ 8 hours of video content
✔ PDF Materials
✔ Video captions
Build a Complete Attitude Estimation System on STM32
This course has one clear goal: to teach you how to transform raw IMU sensor data into accurate roll, pitch, and yaw measurements and implement a real-time orientation estimation system on an STM32 microcontroller.
Prepare for Advanced Robotics Projects
Gain the core knowledge required to build systems such as drone flight controllers, self-balancing robots, and stabilization platforms.
Bridge Theory and Real Embedded Systems
Most tutorials explain either math or microcontroller programming.
This course combines both so you can implement advanced algorithms directly on STM32 hardware.

Write Clean Embedded Firmware
You will learn how to structure real embedded firmware projects
Strengthen your embedded systems skills while working with:
-
STM32CubeIDE
-
HAL API
-
Interrupts and timers
-
DMA data transfers
Get Clear Answers to Your Questions
Learning accelerates when you ask questions.
You’re encouraged to be proactive and curious throughout the course. I respond to questions within 12 hours, and most of the time within 2–3 hours.

Steppeschool Reviews
Course Content
-
CH0 - Introduction
4 lessons- 1 - Welcome to the course
- 3 - Prerequisites and is this course for you?
- 4 - Attitude estimation problem
- 5 - The pdf file contains slides to be used in the course
-
Ch 1 - STM32 Embedded programming
11 lessons- 1 - Introductory words
- STM32CubeIDE 2.0 and STM32CubeMx Project Setup
- 2 - STM32 CubeIde Project creation
- 3 - Using SWV for printf function
- 4 - Using SWV to plot variables
- 5 - SPI theory
- 6 - SPI Configuration using STM32CubeMx
- 7 - SPI wirings
- 8 - Reading ‘Who am I’ register
- 9 - SPI data transmission
- Rate & review this course
-
CH2 - ICM20948 Driver Development
8 lessons- 1 - First version of the library
- 2 - Testing the library
- 3 - How to read the magnetometer?
- 4 - Magnetometer update 1
- 5 - Magnetometer update 2
- 6 - Testing a new version of the library
- 7 - DMA Theory
- 8 - DMA configuration
-
CH 3 - IMU Calibration: bias removal, normalization, and scaling
9 lessons- 1 - Removing gyroscope biases
- 2 - Magnetometer bias explanation
- 3 - Timer Update Interrupts
- 4 - Magnetometer bias removal
- 5 - Normalization and scaling of IMU data
- 6 - ARM MATH Library Installation
- 7 - Library Integration
- 8 - A notion of frame
- 9 - Testing the library
-
CH 4 - Euler angles
11 lessons- 1 - Attitude estimation, slides
- 2 - A notion of frame in detail
- 3 - 2D rotation
- 4 - Euler angles and Rotation Matrix
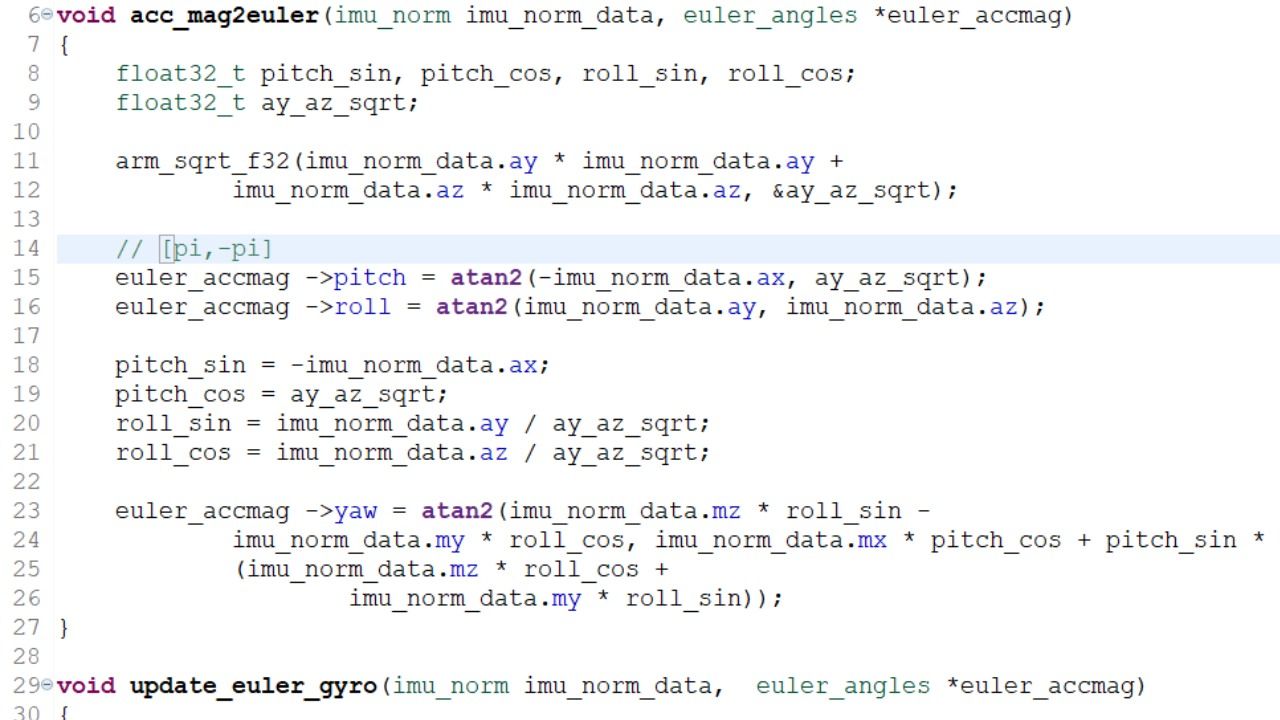
- 5 - Using the accelerometer to obtain pitch and Roll angles
- 6 - Using the magnetometer to obtain the Yaw angle
- 7 - Using the gyroscope to obtain the Euler angles
- 8 - Library Integration
- 9 - Complementary Filter
- 10 - Testing the libraries
- Rate & review this course
-
CH 5 - Quaternion Theory
9 lessons- 1 - Gimbal Lock or why we need quaternions
- 2 - Introduction to Quaternions
- 3 - Quaternions, practice work
- 4 - Quaternion Multiplication
- 5 - Quaternion Rotation
- 6 - Quaterion Rotation Example
- 7 - Rotation matrix based on the Quaternions
- 8 - Quaternion Library integration
- 9 - Defining multiple rotations using quaternions
-
CH 6 - Quaternion Attitude estimation and Complementary Filter
8 lessons- 1 - How to obtain the Quaternions using the accelerometer?
- 2 - How to obtain the Quaternions using the magnetometer?
- 3 - How to obtain the Quaternions using the gyroscope?
- 4 - Complementary Filter for the Quaternion based Attitude Estimation
- 5 - Library Integration 1
- 6 - Library Integration 2
- 7 - Complementary Filter Library Integration/Explanation
- 8 - Quanternion Complementary Filter Test
-
CH 7 - Extended Kalman Filter Sensor Fusion
7 lessons- 1 - Linear Kalman Filter Recap
- 2 - Extended Kalman Filter Theory
- 3 - Attitude Estimation using the Extended Kalman Filter
- 4 - The extended Kalman Filter, practice work
- 5 - Library Integration 1
- 6 - Library Integration 2
- 7 - Extended Kalman Filter demo
NICE TO MEET YOU
Tutor
Greetings! I'm Yerke, the founder/editor/SEO/ loader/marketer of SteppeSchool. With a Bachelor's degree in Electrical Engineering and a Master's degree in Robotics/Mechatronics, I completed my Ph.D. in Robotics/Mechatronics.
Currently, as an automation engineer, I spend my free time teaching people about electronics, embedded programming, and robotics. For years, I've been curating insightful content on my YouTube channel (+700k views), offering valuable insights to students and enthusiasts alike.

Target audience
Built For Engineers Like You
➜ You want to learn communication interfaces, including SPI, I2C, and UART along with direct memory access (DMA)
➜ You want to learn algorithms and principles related to attitude estimation, including Euler angles, Quaternions, Complementary filter, and the Kalman Filter.
➜ You want to communicate with IMU sensors and sample data in real-time
➜ You want to advance your knowledge in programming STM32 microcontrollers
Requirments
WHAT you'll need
✔ STM32 microcontroller board
✔ IMU sensor
✔ Basic knowledge of programming STM32 MCUs
✔ Basic understanding of math. You should be familiar with terms such as vectors, matrix multiplication, and basic trigonometric functions (cos, sin, etc.).
